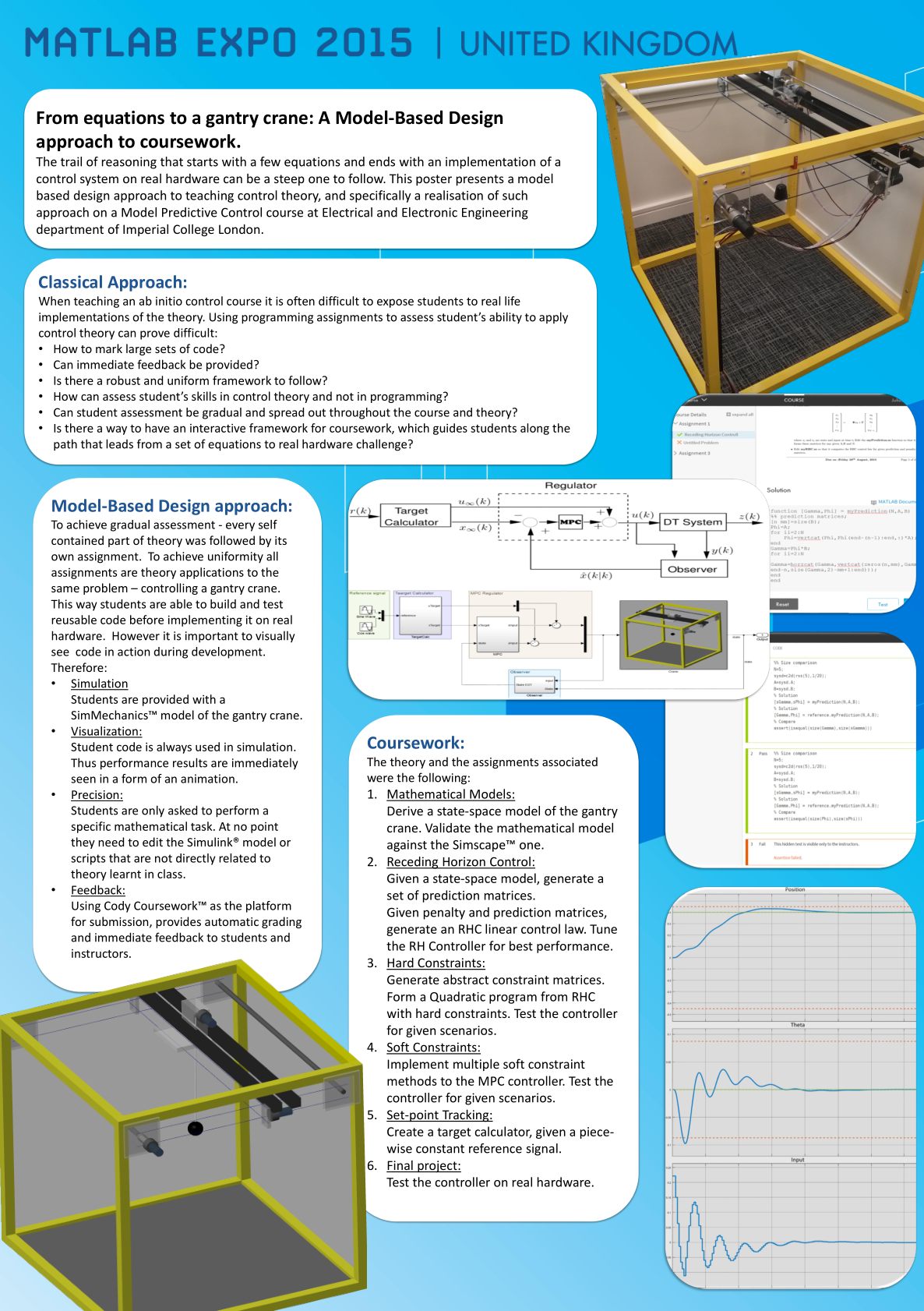
A year after the Quadcopter project, I went back to Mathworks for yet another internship. This time I was helping out on project helping Imperial College London to create a Model Predictive Control (MPC) course coursework using Mathworks products. Supervised by Kameswarie Nunna, I was learning MPC and creating exercises about implementing an LQR, RHC, MPC controllers on an educational gantry crane hardware.
While I absolutely fell in love with optimal control, another awesome part of the project was the model-based design approach. I designed a full simscape (simbody) simulation of the hardware we had. This included all friction, motors, everything. It was fantastic to see that you can develop and just by switching a simulink block deploy and validate results in hardware.
The project, controllers and maths excersizes about them were shown off at poster session at MATLAB EXPO 2015: